如视携手英伟达,将毫米级三维重建带到边缘端
一套 100 平方米的住宅,扫描时间大约四分钟。操作者手持一台大号手电筒大小的设备,沿房间走一圈,放下设备时,系统已经生成了彩色点云和 3DGS。15分钟后,一张标注了墙体、门窗、上下水管线和强弱电箱的 CAD 户型图在云端自动生成。不需要卷尺,不需要人工绘图,直接自动输出 CAD 文件,单尺寸测距误差最小仅 3mm。
这台设备是庞加莱 R1(标准版),一款由如视研发的手持实景扫描仪。
如视是一家专注三维重建技术的空间智能公司,在该领域深耕近十年,产品覆盖房产、家装、工业巡检、文博展览等多个行业。R1(标准版)的实时点云处理运行在内置的 NVIDIA Jetson Xavier™ NX 模组上。
如视的另一款旗舰产品伽罗华 P4(标准版)——面向超高清采集场景的三脚架式 VR 扫描仪——搭载了 NVIDIA Jetson Orin™ Nano。两台设备覆盖了从快速现场测量到博物馆级三维数字化的不同需求,AI 推理全部在边缘端完成。
两台设备,两颗Jetson芯片
两款产品选择不同的 NVIDIA Jetson 模组,对应各自工作流的具体算力需求。
庞加莱R1(标准版)搭载Jetson Xavier NX
R1(标准版) 是一款为速度和便携性设计的手持扫描仪,主要用于精准量房、施工现场勘测和装修前期测量。Xavier NX以紧凑的体积和低功耗提供高性能AI推理能力。

扫描过程中,R1(标准版)的激光雷达生成高密度点云,RGB 相机同步采集色彩数据。Xavier NX 在设备端实时运行如视自研的点云降噪算法和结构识别算法,自动识别墙体、门洞、窗户、水管、电箱等建筑要素,输出结构化三维模型。该模型经云端处理后,15 分钟内即可转化为 CAD 图纸。
伽罗华 P4(标准版) 搭载 Jetson Orin Nano
P4(标准版) 面向对画质和空间细节要求极高的场景:博物馆展览、高端餐饮空间、大型工业厂房。
NVIDIA Jetson Orin Nano 提供34TOPS的AI算力,支撑更重的边缘计算负载。

P4(标准版) 采集 24K 分辨率全景图像——单帧约 3 亿像素——并在设备端完成实时拼接和深度信息解算。其激光雷达与高清相机阵列同时生成几何点云和超高清视觉数据,Orin Nano的高吞吐量和多传感器融合能力使两路数据流在现场即完成对齐,避免了传统设备"先采集、后计算"造成的数据断层。
多行业实践部署
如视搭载 Jetson 的设备已在多个行业投入使用。以下案例展示了边缘AI处理如何转化为可量化的运营效率提升。
住宅装修——福州安住
福建省家装公司福州安住引入庞加莱 R1 用于现场量房。一个两人团队在 10 天内完成了 454套住宅的扫描采集,套均耗时 2.8 分钟。此前,单套人工量房通常需要 40 分钟以上,且依赖经验丰富的技术人员。R1(标准版) 输出的 CAD 数据可直接导入 BIM 系统,省去了人工绘图环节。
工业数字孪生——雀巢中国
雀巢在中国运营 22 家工厂、3 个研发中心和 5 个创新中心。如视使用伽罗华 P4(标准版) 为雀巢的生产设施构建高保真三维数字孪生,覆盖安全管理、远程巡检和员工培训等场景。
雀巢中国的石秋香表示:"如视 VR 有效帮助管理层和救援人员第一时间掌握工厂情况,迅速定位风险点。"
实际效果包括:新员工培训周期缩短约 50%,跨地域协作差旅成本降低约 70%,安全隐患排查效率提升约 3 倍。
伽罗华P4(标准版) 生成的三维模型可导出为 OpenUSD/USD 兼容资产,从而能够被基于 NVIDIA Omniverse库和包括NVIDIA Isaac Sim在内的开放框架构建的智能体与应用程序所使用,可进一步用于数字孪生和机器人训练。
文化遗产——清华大学校史馆
清华大学校史馆总建筑面积 5,000 平方米,展区面积 3,000 平方米,使用伽罗华 P4(标准版) 完成了1:1 VR 数字化复刻。成果支持中英文双语导航、AI 智能导览和语音讲解。

数字化后的校史馆全年 365 天面向全球校友和公众开放。8 倍无损放大功能使远程访客可以细看画作笔触和展品铭文——这些细节即使在现场也不易观察。该项目同时为无法长期展出的珍贵藏品建立了永久数字档案。
面向具身智能和物理AI
如视已积累超过 5,800万组空间数据,覆盖面积达48亿平方米,是全球规模最大的真实场景三维空间数据库之一。这一数据资产的价值正在从传统的可视化应用向更广泛的领域延伸。
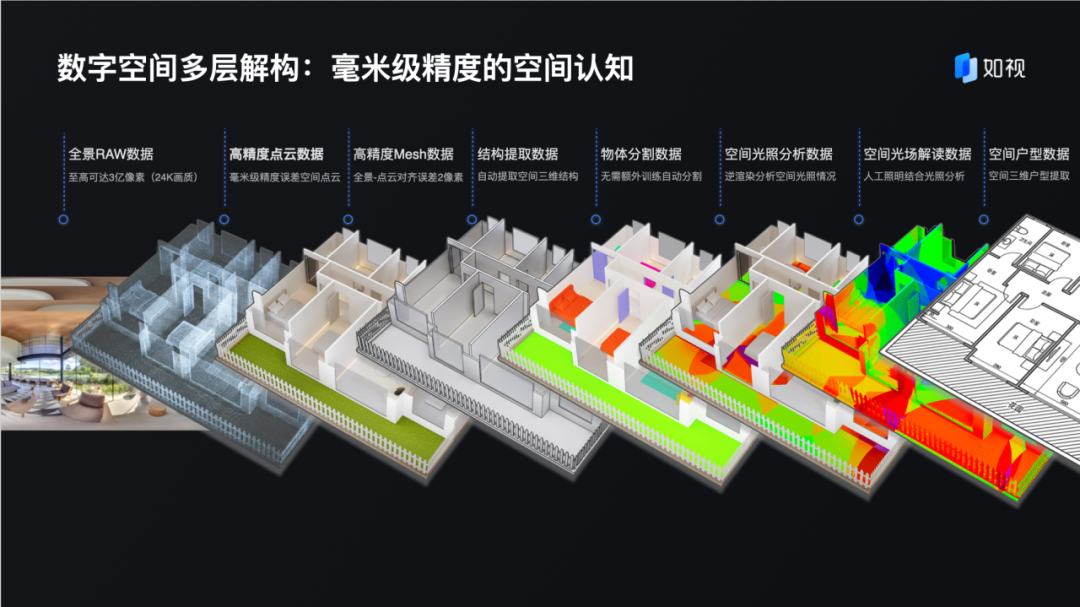
如视三层空间解构流水线当前输出的结构化数据包括:几何尺寸、材质粗糙度、光照条件和物体空间关系。后续规划将拓展至重量估算、摩擦系数和受力分析——这些属性是机器人训练环境中实现真实物理仿真所必需的。
如视的三维模型已兼容 NVIDIA Omniverse 库,支持Real2Sim2Real工作流:真实空间高保真采集→1:1 虚拟环境重建→可交互仿真训练→机器人实际部署。这一闭环的每个阶段都依赖精确、属性丰富的空间数据——正是搭载 Jetson 的边缘采集设备所产出的数据类型。
随着空间AI模型和具身智能系统的成熟,对高质量真实场景三维训练数据的需求将持续增长。结合NVIDIA边缘算力驱动,如视的空间采集基础设施为这一需求提供了底层支撑。


