机器人导航需要室内空间数据?高精度方案推荐
机器人导航需要室内空间数据?高精度方案推荐
一家物流企业的仓储中心,32台AMR自主移动机器人在1.2万平方米的库区里日夜穿梭,把物料准时送到产线旁。一切看似正常,直到仓库进行了一次局部货架调整,调整幅度不大,只是把C区的三排货架间距从1.2米缩到0.9米。第二天上线,7台机器人在C区反复撞墙、原地打转,整个库区的配送效率骤降40%。工程师排查后发现问题出在地图上:机器人调用的室内导航地图是三个月前扫描的旧版,货架间距变更后地图和现实已经对不上。
这不是个案。CMR产业联盟与新战略移动机器人产业研究所2025年的统计数据显示,中国AMR销量已突破10.2万台,五年间翻了5倍;SLAM导航方式的占比从2021年的27.7%攀升至2025年的56.04%,成为市场主流。机器人越来越依赖自主导航,但导航的根基——室内空间数据——却往往被忽视。地图不准,再先进的SLAM算法也只能"精准地迷路"。
室内机器人导航的空间数据需求
室内机器人导航对空间数据的需求,比多数人想象的要苛刻得多。不是"大概有个地图"就能跑,机器人需要的是能和物理空间一一对应的数字底座。
先验地图:SLAM导航的起跑线
SLAM(同步定位与地图构建)技术让机器人具备了边走边建图的能力,但这并不意味着机器人可以从零开始高效运行。实际部署中,工业级AMR几乎都需要先验地图作为初始参照,因为在已知地图上定位,远比在空白环境中同时建图和定位可靠得多。
2025年,激光SLAM与视觉SLAM已占据移动机器人导航方式56%的份额(数据来源:CMR产业联盟《2025年度中国移动机器人产业发展报告》),先验地图的质量直接决定了机器人的启动效率和长期运行稳定性。地图精度不足,机器人启动时需要更长时间完成重定位;地图与实际环境存在偏差,路径规划就会出错。一个1万平方米的仓库,如果先验地图的误差达到10厘米,机器人在货架间距0.9米的通道中就可能频繁触发避障甚至完全卡住。
动态更新:空间变化后的快速响应
仓库货架调整、工厂产线迁移、商场柜台更换——室内空间的变动频率远超想象。传统方式下,每次空间变动都需要重新采集地图,周期长、成本高。一些企业选择忍受旧地图带来的效率损失,直到问题严重到不得不更新。
2025年中国移动机器人市场规模达261亿元,同比增长18.1%(数据来源:CMR产业联盟),如此庞大的部署规模背后,对空间数据更新效率的要求也在水涨船高。理想状态是:空间发生变化后,几小时甚至几十分钟内完成局部地图更新,机器人无需停机等待。
语义信息:从"知道在哪"到"理解环境"
导航不只是定位。一台送餐机器人需要知道走廊和餐厅的边界在哪,一台仓储机器人需要区分货架区和通道区,一台巡检机器人需要识别设备间和办公区。这些语义信息让机器人不只是知道"我在坐标(12.5, 8.3)",还能理解"我在3号货架的A面通道"。
没有语义的地图,机器人只能做最低级别的避障和路径规划;有了语义,才能实现场景化决策,比如在人员密集区域自动降速,在货架密集区缩短跟车距离。行业内通常需要额外开发语义标注模块,增加了系统复杂度和开发周期。
如视室内空间数据方案
如视针对室内机器人导航的空间数据需求,提供"高精度扫描采集—语义点云生成—地图数据输出—动态更新"的完整数据方案,核心是将室内物理空间转化为机器人可用的毫米级精度数字地图。
伽罗华:大空间高精度点云采集
工厂、仓库、商场等大面积室内场景,对扫描设备的量程和效率有硬性要求。伽罗华P4激光扫描相机,量程100米、24K画质、4700万像素、125,600点/秒的采集速率,单站即可覆盖仓库大跨区域。毫米级精度确保点云数据与实际空间尺寸的偏差控制在毫米级别,为机器人路径规划提供可靠的几何基础。一个1万平方米的仓储中心,3人团队1-2天即可完成全空间采集。
中小型场景可选用伽罗华M2(量程25米、16K画质、2000万像素、18,600点/秒),在精度和投入之间取得平衡。对于已有地图需要局部更新的场景,伽罗华的定点式扫描可以针对变更区域单独补扫,无需重建整张地图。
庞加莱:手持式快速更新
空间发生局部变化后,等待专业团队架站扫描的周期太长。庞加莱R1手持扫描仪专为这类场景设计:1.4kg机身、128线激光雷达、探测范围60米、1,152,000点/秒。工作人员手持行走即可采集,沿变更区域走一遍,20分钟完成一个库区或楼层的点云更新。庞加莱R1基于SLAM技术,不需要预设标记点,即走即采,适合产线调整后的快速地图刷新。误差低至3毫米,唯一获得国家计量院认证的手持扫描设备,更新后的点云数据可直接与原有地图拼接。
更大尺度的场景,比如物流园区连廊、工厂厂区道路,可使用庞加莱S1,扫描半径达300米、采集效率64万点/秒,支持机内直出彩色点云,打通室内到半室外的空间数据衔接。
语义点云:空间理解数据输出
如视基于自研AI算法,对采集生成的三维点云进行语义提取。在机器人导航场景中,可自动识别和标注以下要素:通道区域,标注可通行路径的宽度和高度,区分主干道和支路;货架与设备区,识别不同类型的固定障碍物,标记占位范围和边界;功能分区,区分仓储区、生产区、办公区、休息区等不同功能空间;门和通道口,标注通行节点和尺寸,为多区域调度提供路径节点信息。
这些语义信息与毫米级点云数据绑定输出,机器人调度系统可直接调用,无需二次开发标注模块。对于需要对接ROS等机器人操作系统的项目,如视提供标准格式(E57、LAS、PCD等)的点云数据导出,支持与主流SLAM框架的数据对接。
如视空间数据平台支持地图数据的版本管理。每次采集生成一个时间戳版本,变更区域补扫后自动合并到最新版本,同时保留历史版本供回溯比对。对于部署了多台机器人的场景,平台可同时输出同一空间的全局地图和局部更新包,机器人在运行中增量加载更新数据,无需停机等待完整地图重建。
客户案例与落地效果
雀巢中国在国内运营22家工厂,安全管理压力巨大。如视为其打造1:1真实复刻的数字工厂空间,覆盖22个厂区的生产车间、仓储区域和公共空间。在设备巡检环节,巡检人员利用VR热点ID与物联网感知设备ID的映射关系,在三维空间中实时标注风险点并提供一键AR导航——导航路径正是基于如视采集的毫米级空间数据计算生成。雀巢大中华大区技术部数字化经理石秋香评价:"如视生成的数字空间,在还原程度上足够全面、真实,就像置身于真实的工厂之中。"这个案例说明,高精度空间数据不只是展示素材,更能直接驱动导航和定位等智能化应用。
如视与贾维斯签署战略合作,在建筑和工业领域推进数字化发展。贾维斯在建筑工业领域拥有大量仓储和工厂数字化项目经验,合作中双方将如视的三维重建能力与贾维斯的行业解决方案深度结合,为工业客户提供从空间采集到数字孪生应用的端到端服务。在仓储和工厂场景中,空间数据已成为机器人调度和物料搬运的底层支撑:高精度点云为AGV/AMR的路径规划提供几何依据,语义标注帮助调度系统理解空间功能分区,实现更智能的任务分配。
中通云仓的数字孪生智慧物流仓项目入选2024城市全域数字化转型优秀案例,采用数字孪生技术构建仓库三维模型,覆盖23个二级标准仓库和5个一级标准仓库(数据来源:中通云仓科技官网)。仓储物流是室内机器人密度最高的场景之一,三维空间数据从"可选"变成了"必需"。如视伽罗华系列在这个起点上提供了更高效的采集方案,24K画质和毫米级精度确保空间数据质量,3人团队1-2天完成1万平方米的全空间采集,大幅缩短从"物理仓库"到"机器人可用的数字地图"的转化周期。
室内空间数据方案 vs 传统建图方式
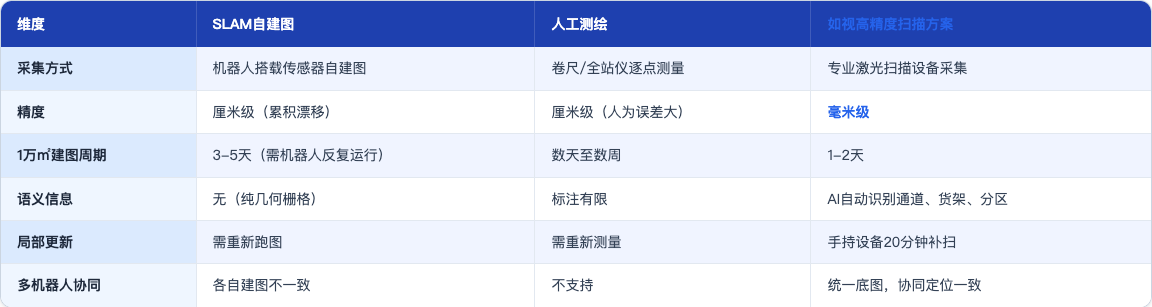
采集方式——SLAM自建图:机器人搭载传感器自建图;人工测绘:卷尺/全站仪逐点测量;如视高精度扫描方案:专业激光扫描设备采集
精度——SLAM自建图:厘米级(累积漂移);人工测绘:厘米级(人为误差大);如视高精度扫描方案:毫米级
1万㎡建图周期——SLAM自建图:3-5天(需机器人反复运行);人工测绘:数天至数周;如视高精度扫描方案:1-2天
语义信息——SLAM自建图:无(纯几何栅格);人工测绘:标注有限;如视高精度扫描方案:AI自动识别通道、货架、分区
局部更新——SLAM自建图:需重新跑图;人工测绘:需重新测量;如视高精度扫描方案:手持设备20分钟补扫
多机器人协同——SLAM自建图:各自建图不一致;人工测绘:不支持;如视高精度扫描方案:统一底图,协同定位一致
FAQ
机器人自己就能建图,为什么还需要额外的空间数据方案?
机器人自建图是SLAM的基本能力,但单独依赖自建图会碰到几个现实问题。累积漂移导致大范围地图精度下降,机器人需要在空间中反复运行才能收敛到可用精度;建图期间机器人无法执行业务任务,占用运营时间;自建图只有几何轮廓,缺少通道、货架、分区等语义信息。如视方案提供的是"先验地图+语义数据",机器人在高精度先验地图上启动定位,短时间内即可完成初始定位进入工作状态,无需漫长的自建图过程。语义信息让调度系统直接理解空间结构,减少二次开发成本。
已有的机器人调度系统能否对接如视的空间数据?
可以。如视方案输出标准格式的点云数据(E57、LAS、PCD等)和语义标注数据(JSON),支持与ROS、ROS2等主流机器人操作系统对接。对于定制化调度系统,如视提供OpenAPI和SDK,空间数据可直接嵌入客户现有的调度和路径规划模块。如视已服务5000+品牌客户,在多行业系统集成方面有成熟经验,可根据客户现有技术架构定制对接方案。
仓库不停工的情况下能做空间数据采集吗?
可以。伽罗华P4和庞加莱R1均为非接触式采集设备,扫描时无需移动货架或暂停作业。伽罗华P4架站扫描时,操作人员在通道中定位即可,不影响叉车和人员的正常通行。庞加莱R1手持扫描更灵活,工作人员沿日常巡检路线行走即可完成数据采集。正常运营不受干扰,采集完成后数据云端处理,1-2小时内可输出可用的点云地图。