三维重建怎么做?常见技术原理与应用场景详解
在工业生产、文物保护、工程测绘及科技研发等领域,三维重建已经成为数字化工作的基础环节。无论是大型厂房的空间复刻、文物展览的数字化保护,还是城市基础设施的测绘,掌握三维重建的方法和原理,是高效、安全、精准完成项目的前提。
本文将围绕三维重建怎么做展开,讲解主流技术原理、精度差异与自动化程度,并介绍在大空间、高精度场景下的专业解决方案。
一、三维重建的三种主流方式
目前三维重建主要有三种方式:图片建模、激光雷达扫描,以及深度视觉结合 SLAM 技术。不同技术各有特点,适用场景和精度也存在明显差异。
1. 图片建模(Photogrammetry)
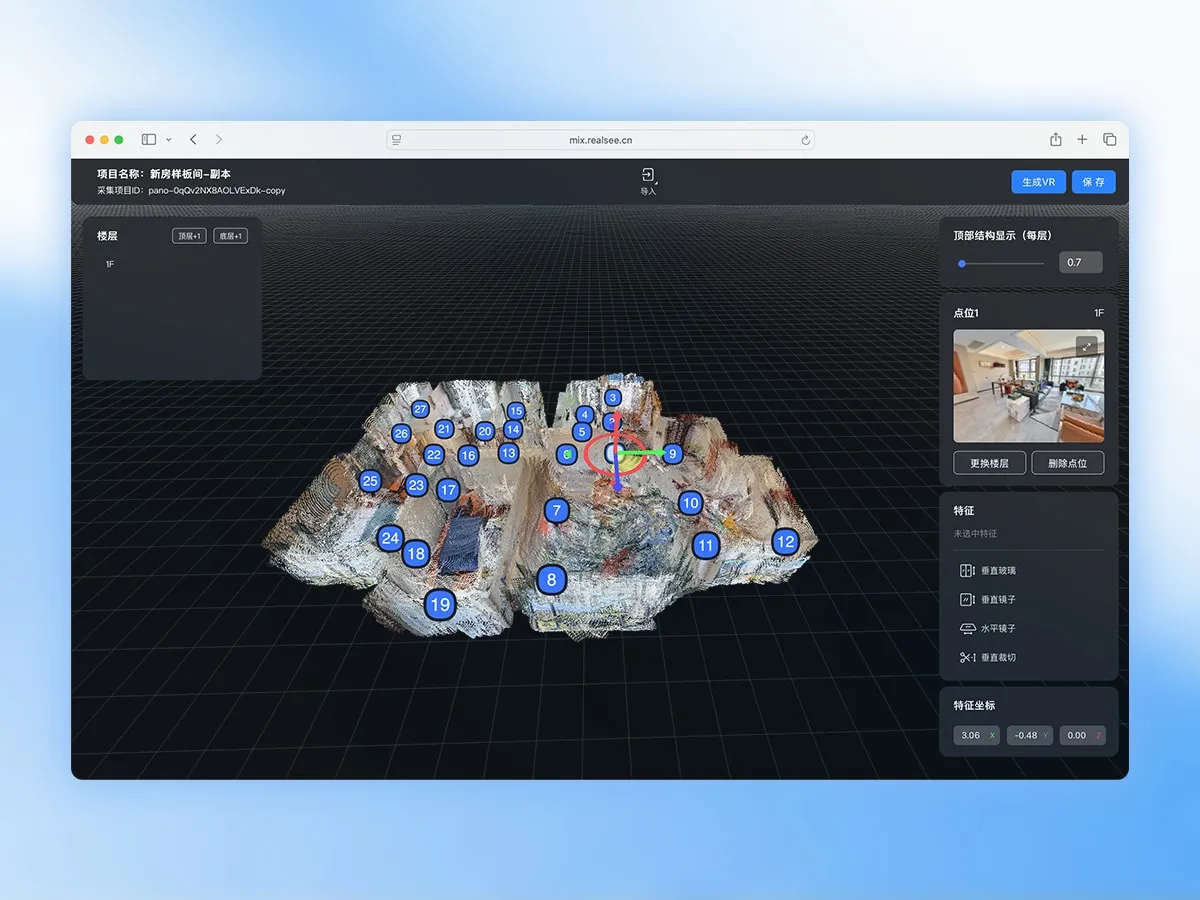
原理:通过拍摄对象的多角度图片,利用计算机视觉算法(如特征点匹配、相机位姿估计、三角测量等)生成稠密点云,再进一步生成三维模型。
特点与应用:
- 优点:成本低,硬件门槛低,只需相机甚至全景图即可。
- 缺点:对光照、纹理要求高;大空间或复杂结构难以保证精度;处理速度一般,通常需要人员手动拼接建模。
- 典型场景:文物小件数字化、展品建模、室内小型空间复刻。
2. 激光雷达扫描(LiDAR)
原理:利用激光发射器测距原理,对环境进行点云采集,通过反射时间和角度信息计算空间位置,实现高精度三维重建。
特点与应用:
- 优点:高精度、高可靠性,可在低光照或无纹理环境下工作,可自动化。
- 缺点:设备成本高,操作门槛较高;数据量大,需要专业软件处理。
- 典型场景:工业厂房测绘、城市基础设施扫描、大型文博馆或历史建筑复刻。
3. 深度视觉 + SLAM(Simultaneous Localization and Mapping)
原理:深度相机获取空间深度信息,同时结合 SLAM 技术进行位姿跟踪与环境地图构建,实现实时三维重建。SLAM 能够边走边建图,即便在大空间或动态环境下,也可保持连续、高精度建模。
特点与应用:
- 优点:实时建模、轻量化便携、支持大空间扫描;可快速生成点云或三维模型。
- 缺点:部分低纹理或强光环境下精度可能下降;对算法优化和硬件性能有一定要求。
- 典型场景:工厂车间全景测绘、事故现场复原、文博馆大型展厅数字化、工程管线巡检。
二、精度差异与自动化程度对比
- 图片建模:精度中等,依赖人工拍摄和后期处理,适合小型空间或文物复刻。
- 激光雷达(例如:伽罗华 P4):精度高,可达 10mm,适合高精度复刻和复杂环境,但操作门槛较高,自动化程度中等。
- 轻量化 SLAM(例如:庞加莱 S1 / R1):精度较高,可达 20mm,支持实时边走边建图,自动化程度高,适合大空间快速建模和工业巡检。
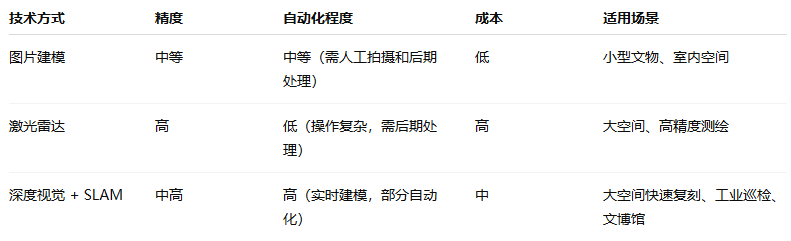
⚡ 可以看出,当项目涉及大空间且需要高精度时,传统图片建模效率低,而激光雷达虽然精度高,但操作复杂、成本高。此时,基于轻量化 SLAM 技术的设备可以兼顾速度、精度和便携性。
三、如视专业设备简介:庞加莱 S1 / R1 与 如视伽罗华 P4
针对大空间、高精度需求,专业设备可大幅提升效率和成品精度。
1. 庞加莱 S1 / R1 – 轻量化 SLAM 扫描仪
- 核心优势:基于轻量化 SLAM 技术,实现边走边建图,适合快速生成大空间三维模型。
- 精度与效率:20mm精度,实时建模,自动化程度高,极大降低人工操作和后期处理成本。
- 应用场景:
- 工厂车间全景测绘
- 交通事故现场复原
- 大型文博馆展厅复刻
- 隧道、管道等狭窄或复杂环境扫描
- 特点总结:便携、自动化、高精度,兼顾效率和大空间适应性。

2. 如视伽罗华 P4 – 高精度激光雷达扫描仪
- 核心优势:基于激光雷达与专业算法,精确采集空间点云,适合对精度要求极高的环境。
- 精度与效率:10mm精度,可在低光照、无纹理环境下稳定工作,适合高保真建模。
- 应用场景:
- 高端房产样板间数字化
- 工业展厅及设备建模
- 文物及历史建筑精细复刻
- 大型商业空间或工业厂区精密测绘
- 特点总结:精度最高、数据可靠,但设备成本与操作门槛较高。

3. 技术选择对比
- 庞加莱 S1 / R1:采用深度视觉结合轻量化 SLAM 技术,适合大空间快速扫描。该设备精度较高,支持实时建模、点云自动化生成、3dgs模型生成,自动化程度高,操作便捷,非常适合工业巡检、工厂车间测绘或文博馆展厅复刻等需要快速生成三维模型的场景。
- 如视伽罗华 P4:基于激光雷达技术,精度极高,可达到毫米级,适合高精度复刻和复杂环境测绘。该设备自动化程度中等,需要一定操作和后期处理经验,适用于高端房产样板间、工业展厅、历史建筑复刻或大型商业空间测绘等对精度要求极高的场景。
⚡ 总结:如果项目强调速度和自动化,且空间较大,轻量化 SLAM 的庞加莱 S1 / R1 是最佳选择;如果强调最高精度和环境适应性,如视伽罗华 P4 是首选。
四、总结
三维重建的方法选择,应根据空间大小、精度需求、成本预算以及自动化程度综合考虑:
- 小空间、低成本、低精度 → 图片建模。
- 高精度、复杂环境、自动化建模 → 伽罗华 3D 激光扫描仪。
- 超大空间、快速建模 → 深度视觉 + SLAM(如庞加莱 S1 / R1)。
通过科学选择技术手段,企业和机构可以在工业测绘、文博数字化、工程巡检等场景中,实现高效、安全、精准的三维重建。