Floorplan Generation from 3D Point Clouds: A Space Partitioning Approach
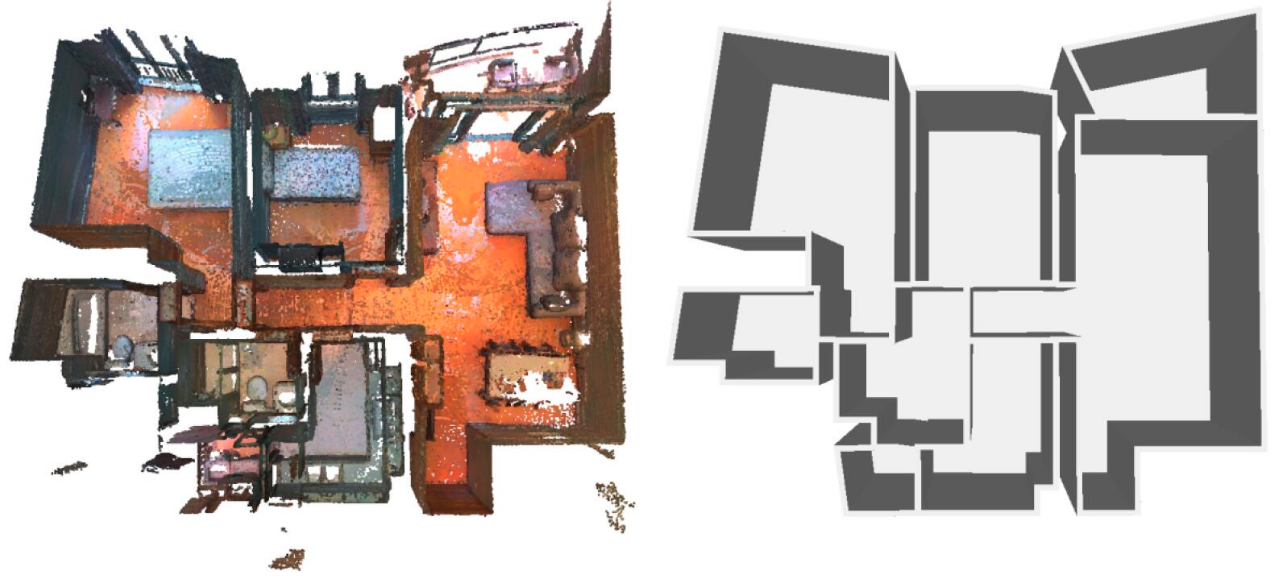
Figure 1: Goal of our approach. Left: the algorithm departs from raw point clouds as input data. Right: the foorplan of the indoor scene is reconstructed as a planar graph where each simple cycle represents the polygonal boundary of a room. Note that the 2D foorplan is converted into a 3D CAD model for visualization purpose.
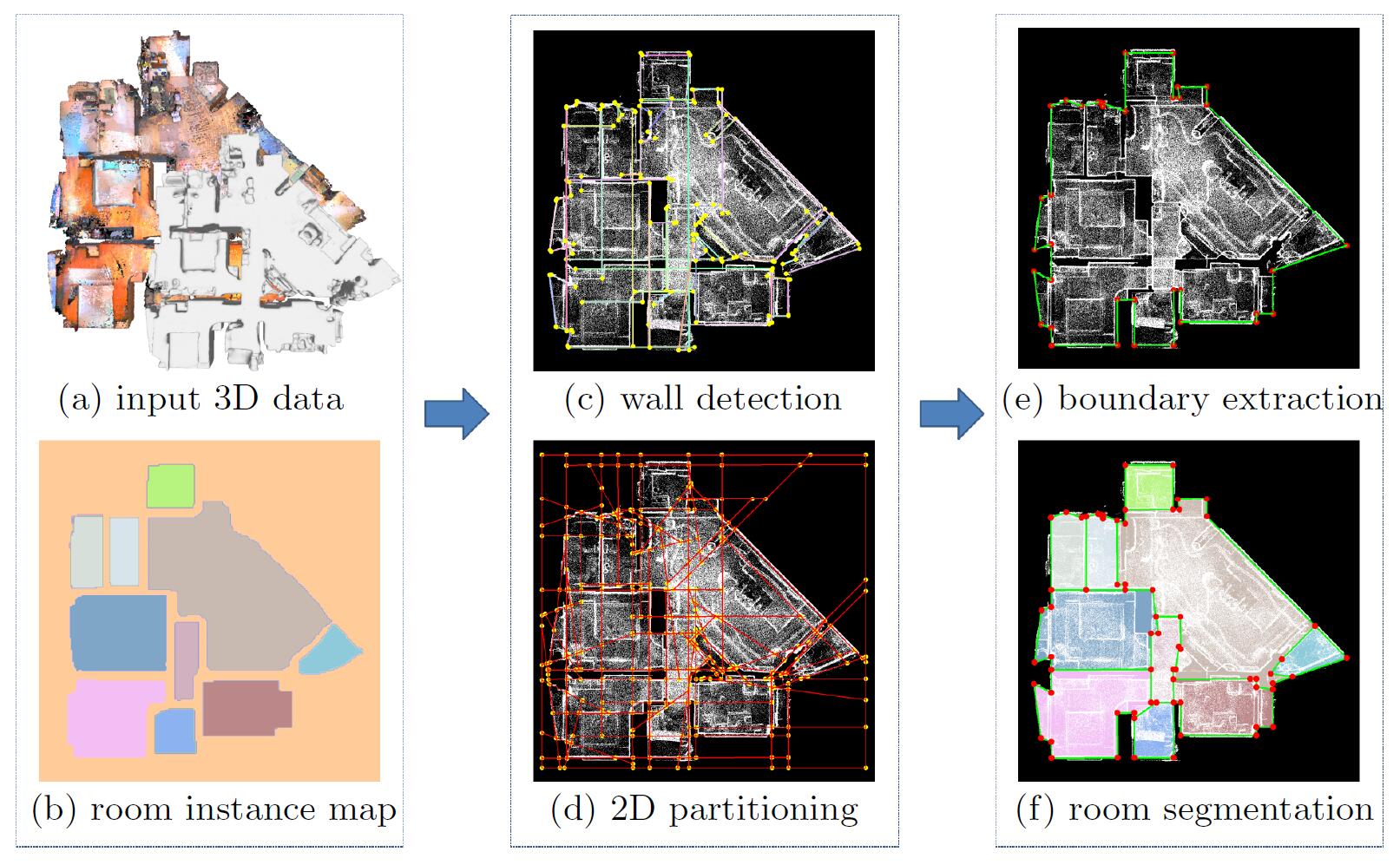
Figure 2: Overview of our approach. Our algorithm starts from a dense triangular mesh generated from the input point cloud (a) as well as an associated room instance labeling map (b). In the primitive detection step, a set of vertical planes that represent wall structures in the indoor scene are first extracted (c). After filtering and regularizing these wall planes, we partition the 2D X-Y space into a set of geometric elements, i.e., vertices, edges and facets (d). Then the boundary edges of indoor scene are recovered by selecting a subset of edges (green ones) through solving a constrained integer programming formulation (e). Finally, the inside space of the indoor scene is divided into different areas (each colored polygonal facet), each of which represents a separated room (f). This step is performed by solving a multi-class labeling problem.

Figure 6: Qualitative comparisons on RGBD scenes. Douglas-Peucker and ASIP return a set of isolated facets while FloorSP and our method produce a valid connected graph. In term of geometric accuracy, foorplans of ASIP and our approach align better with input points than FloorSP and Douglas-Peucker, especially in case of non-Manhattan scenes. In particular, our method achieves to preserve small structure details.

Figure 7: Comparisons on RGBD scenes. We convert the output 2D foorplan of each method into a 3D CAD model with wall thickness equals to 0.1m. The red-to-blue colored points encode the Chamfer distance between the corresponding input points and the 3D CAD models. Douglas-Peucker and ASIP give a relatively lower error within a few seconds while returning a set of non-connected rooms. FloorSP outputs a simple foorplan and 3D CAD model, yet, some wall structures are a bit far away from the input data (see blue points on the vertical walls). By preserving some fine details, our method returns the best error. Moreover, our method is faster than FloorSP by approximately one order of magnitude.
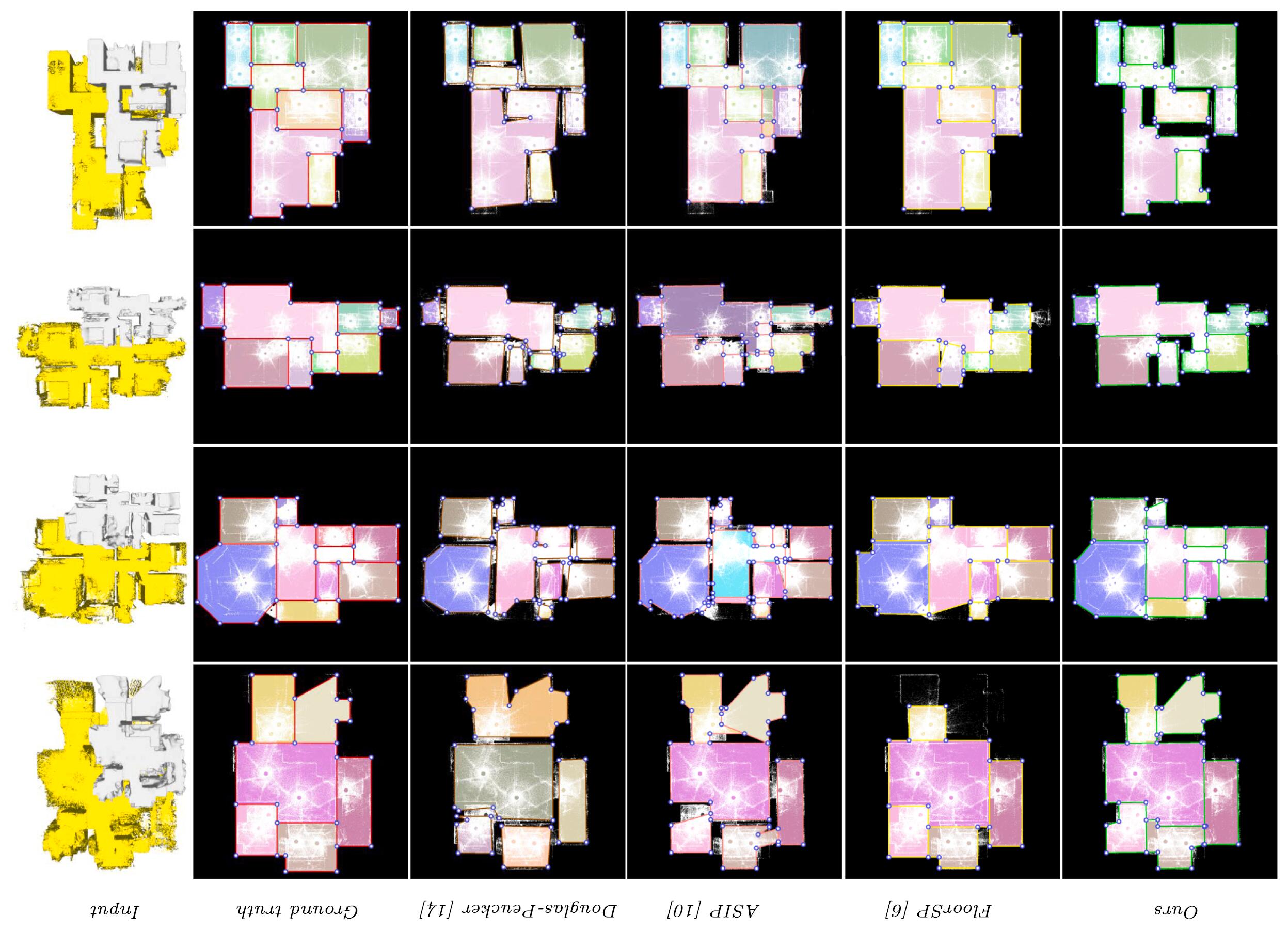
Figure 9: Qualitative comparisons on LIDAR scenes. Our algorithm is less influenced by wrong room instance labeling map caused by different source of scans than the other methods.
Acknowledgements
This work was supported in parts by NSFC (U2001206), DEGP Key Project (2018KZDXM058), Shenzhen Science and Technology Program (RCJC20200714114435012) and Beike (https://www.ke.com). The authors are grateful for the data and annotation tools from Beike, and also thank Muxingzi Li for technical discussions.
Bibtex
@article{FloorPlan21,
title={Floorplan Generation from 3D Point Clouds: a space partitioning approach},
author={Hao Fang and Florent Lafarge and Cihui Pan and Hui Huang},
journal={ISPRS Journal of Photogrammetry and Remote Sensing},
volume={175},
pages={44--55},
year={2021},
}


